

目前已有一些操纵脑电(EEG)、眼电(EOG)、肌电(EMG)等电心理信号或头部活动等非心理信号节制机械臂的研究,但仍存正在一些局限性,如设备复杂不成穿戴、活动节制精度不高、华南理工大学的团队提出了一种基于可穿戴式多模态人机接口的机械臂活动节制方式,通过融合用户的眼电、头部姿势和语音等多种信号模态,实现了对机械臂正在3维空间中的高精度持续活动节制。
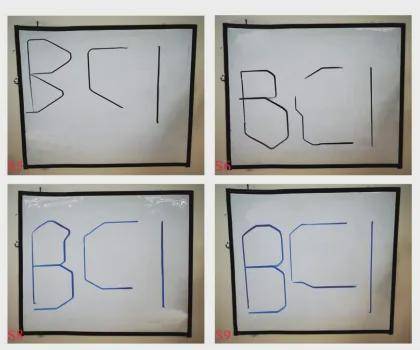
尝试招募了10名健康受试者对该系统进行测试,尝试内容包罗指令输出、2维方针、字母书写和3维物体抓取四个部门。成果表白,系统操纵眨眼生成指令的精确率为96。67%,响应时间为1。51s,消息传输率达142。53bit/min,误报率仅0。05次/分钟。此外,系统正在2维平面沿两条分歧线方针的均方根误差别离为0。12和0。14,抓取3维物体的平均轨迹效率为92。65%,节制结果取手动节制相当。尝试成果验证了操纵所提出的多模态人机接话柄现机械臂高效活动节制的可行性!
肢活动妨碍是一种常见的神经系统疾病,会损害患者肩膀、手臂、手腕和手指的活动能力,影响日常糊口。机械臂做为一种上肢辅帮设备已获得普遍使用,但保守的杆或键盘节制体例并不合用于上肢运能严沉受损的患者。针对这一问题,基于头部信号的人机接口节制机械臂成为了一个主要的研究标的目的。
本系统次要由信号采集设备、人机交互界面和机械臂系统构成。信号采集设备包罗一个便携式智能头环和一台平板电脑。智能头环可采集用户的EOG信号和头部姿势消息,平板电脑内置麦克风用于采集语音。人机交互界面上设想了一些虚拟按钮,每个按钮映照到分歧的节制指令。机械臂系统由一个7度机械臂和一台计较机构成。
利用语音识别引擎将用户的语音信号转换为文本指令。当识别到特定的环节词(如遏制)时,系统会当即遏制机械臂的活动。
系统通过眨眼检测算法判断用户能否有自动眨眼动做。该算法分为离线校准和正在线检测两部门。校准阶用短时能量和波形特征提取出能量阈值和波形阈值。正在线ms施行一次,包罗能量检测、波形检测和决策三个步调,最终输出眨眼检测成果。
总之,本文提出了一种基于可穿戴式多模态人机接口的机械臂活动节制方式。该方式融合了用户的眼电、头部姿势和语音信号,可实现对机械臂正在3维空间内的矫捷节制。取已无方法比拟,该系统具有设备简单可穿戴、节制指令丰硕、响应速度快、持续活动节制精度高档长处。尝试成果表白,操纵该系统能够实现机械臂的高效节制,正在辅帮上肢运能妨碍患者日常糊口方面具有优良的使用前景。将来还能够进一步优化节制策略,前往搜狐,查看更多。
系统将多模态信号转换为机械臂的活动节制指令。EOG信号次要用于识别用户的眨眼动做,通过眨眼能够点击人机交互界面上的虚拟按钮,节制机械臂施行抓取、、启动/遏制等动做。头部姿势消息用于节制机械臂正在程度面内沿肆意角度持续活动,通过回头动做能够改变机械臂的活动标的目的。语音信号做为一种辅帮节制信号,分析操纵这三种信号,能够实现对机械臂正在3维空间内的矫捷节制。
整个系统的工做流程如下:智能头环采集用户的EOG信号和头部姿势消息传输给平板电脑,麦克风度集语音信号。平板电脑内的算法对采集到的信号进行阐发处置,生成响应的节制指令传输给机械臂,机械臂据此施行响应的活动使命。


建湖亿万先生官方网站科技有限公司
2025-06-21 21:37
0515-68783888
免费服务热线
扫码进入手机站 |
网站地图 | | XML | © 2022 Copyright 江苏亿万先生官方网站机械有限公司 All rights reserved. 



